

U.S. Special Operations Forces will test the four-legged CODiAQ robot, equipped with a grenade launcher, for combat operations.
According to Hartpunkt, citing an official press release from Skyborne Technologies, the trials will take place under the “unmanned direct action” concept – combat missions performed with minimal involvement of human personnel.
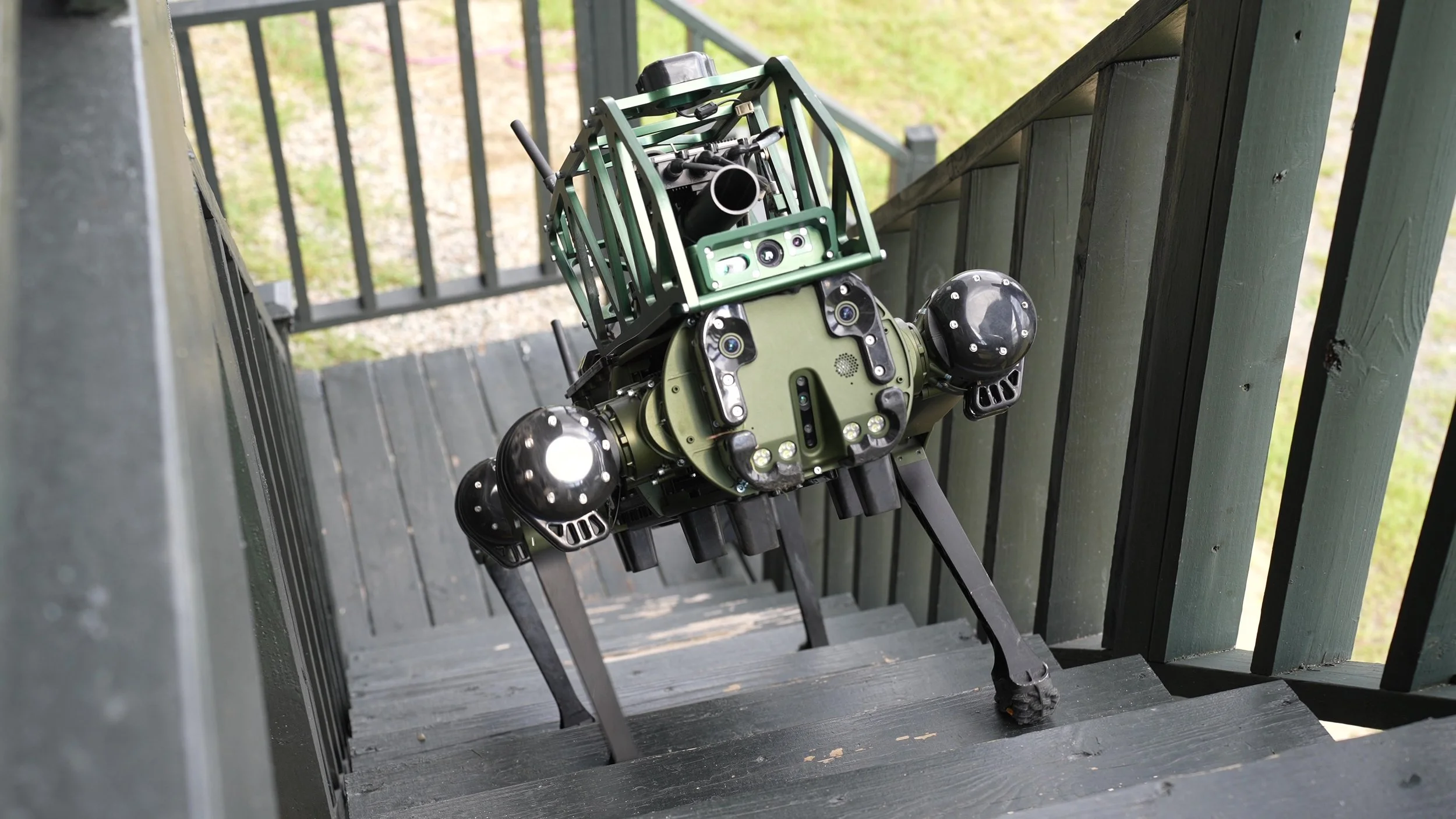
The platform features four robotic legs and can move across rough terrain, climb stairs, and navigate narrow passages. The robot can be equipped with firearms, reconnaissance sensors, and communication systems.
According to the developers, its primary roles include reconnaissance, support for assault teams, position security, and providing fire support in high-risk areas.
The robot is equipped with a grenade launcher for engaging enemy personnel, though the manufacturer says it can also carry various payloads.
U.S. Special Operations Forces are currently evaluating CODiAQ as a platform to link robotic systems, drones, and special operations units into a single command-and-control network. However, despite the planned trials, the system remains at an early stage of development and may not yet satisfy all military requirements.
As noted by Skyborne Technologies, the company has signed a fixed-price $6.5 million Research, Development, Test, and Evaluation (RDT&E) contract with the U.S. Department of Defense.
The agreement includes the delivery of CODiAQ systems consisting of 14 robotic platforms and 28 modular weapon payloads.
The contract also provides full system support for 24 months, including equipment supply, maintenance, and technical assistance to keep the platforms operational throughout evaluation trials.
Militarnyi previously reported that in October 2025, Skyborne Technologies introduced CODiAQ (Controller-Operated Direct-Action Quadruped), a combat-capable ground robotic platform.
CODiAQ is designed to deliver precise remote fire support. The platform combines HAVOC 40 mm and CHAOS 12-gauge weapon modules with an AI-powered target-recognition system, and a single operator controls the robot via a portable controller.


